 22.06.15
22.06.15Rejestrowanie nieostrego światła stanowi wyzwanie dla uzyskania wyraźnych obrazów o wysokim kontraście w wielu zastosowaniach obrazowania. Cyfrowa mikroskopia skaningowa (DSLM) oferuje skuteczny sposób na redukcję nieostrego światła poprzez synchronizację oświetlenia z migawką obrotową nowoczesnych kamer CMOS. Jednak ta precyzyjna synchronizacja wymaga pełnej kontroli nad działaniem migawki obrotowej kamery – funkcji oferowanej przez kamery Tucsen z trybem sterowania migawką obrotową.
Czym jest Rolling Shutter?
Migawka to element aparatu, który rozpoczyna i kończy naświetlanie. Dawniej aparaty naukowe wykorzystywały migawki mechaniczne, otwierając się w celu naświetlenia obrazu i zamykając w celu zakończenia naświetlania. Migawki mechaniczne były powolne i podatne na problemy z niezawodnością przy dłuższym użytkowaniu. Obecnie aparaty naukowe wykorzystują migawki elektroniczne, które są znacznie szybsze, prostsze i bardziej wszechstronne.
Kamery z migawką toczącą rozpoczynają akwizycję od góry matrycy i przesuwają się linia po linii w dół, aż do jej dolnej krawędzi. Akwizycja obejmuje trzy procesy: reset sygnału, naświetlanie i odczyt.
Naświetlanie każdego rzędu rozpoczyna się od zresetowania sygnału akwizycji każdego piksela. Po upływie wyznaczonego czasu naświetlania dla górnego rzędu, odczyt, oznaczający koniec akwizycji, przesuwa się w dół w ten sam sposób. Pozostawia to obszar aktywnych pikseli, który rozciąga się od góry do dołu kamery, a jego wysokość jest określona przez długość czasu naświetlania. Przy pełnej prędkości kamery opóźnienie na linię wynosi zazwyczaj od 5 do 25 mikrosekund na linię pikseli, w zależności od prędkości kamery.
Aby wykorzystać zalety technik optycznych wymagających synchronizacji skanowania oświetlenia i migawki obrotowej aparatu, opóźnienie to jest zazwyczaj zbyt krótkie, co oznacza, że migawka obrotowa działa zbyt szybko, aby inne urządzenia mogły za nią nadążyć. Właśnie tutaj pojawia się tryb sterowania migawką obrotową.
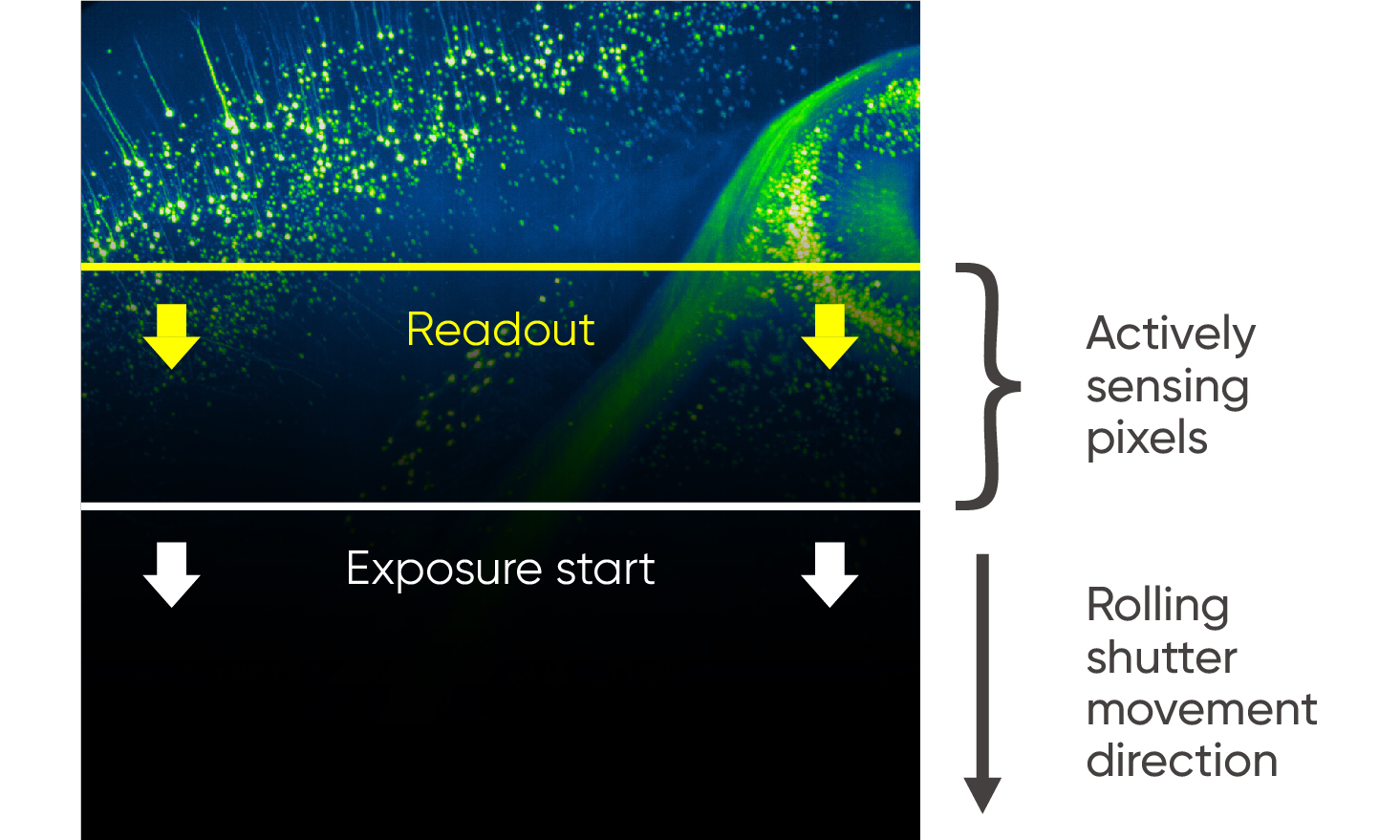
Rysunek 1: Schemat działania rolety
Jak działa tryb sterowania roletą rolowaną
Dzięki wbudowanej inteligencji kamer Tucsen, działanie migawki obrotowej kamery można precyzyjnie dostroić, aby zsynchronizować ją z zewnętrznym sprzętem. Dodając niewielkie opóźnienie między resetowaniem a odczytem każdej linii, można kontrolować czas potrzebny na przesunięcie aktywnego obszaru pikseli w dół matrycy, co umożliwia synchronizację.
Co więcej, „wysokość szczeliny” skanowanego obszaru aktywnego można precyzyjnie dostroić. Dłuższe czasy naświetlania lub krótsze opóźnienia czasowe linii prowadzą do większej wysokości szczeliny. W przypadku DSLM można to wykorzystać do dopasowania tylko oświetlonego obszaru próbki, uzyskując równowagę między naświetlaniem pikseli przez maksymalny możliwy czas dla efektywnego przechwytywania sygnału a minimalizacją rozmycia światła.
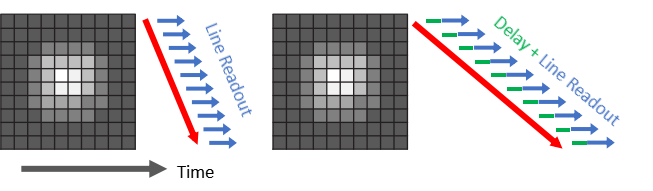
Postać2:Po lewej: Schemat działania migawki toczącej się przy pełnej prędkości kamery. Po prawej: Schemat przedstawiający prędkość migawki toczącej się z trybem sterowania migawką toczącą się, dodającym dodatkowe opóźnienie między liniami, aby umożliwić synchronizację z innym sprzętem.
Dzięki temu opcjonalnemu opóźnieniu należy teraz zrozumieć trzy ważne zmienne, które determinują działanie migawki toczącej się: wysokość obszaru „aktywnych” pikseli i szybkość, z jaką przesuwa się on przez czujnik.
Czas na linię: Jest to domyślny czas potrzebny czujnikowi na odczytanie jednego wiersza i przejście do następnego. Określa on natywną „prędkość” czujnika kamery i można go określić w oprogramowaniu kamery lub oszacować dla danego obszaru zainteresowania (ROI) i trybu kamery, wykonując następujące czynności:

Gdzie „Maksymalna liczba klatek na sekundę kamery” odnosi się do liczby klatek na sekundę w przypadku, gdy nie jest ograniczona przez długość czasu ekspozycji ani częstotliwość wyzwalania zewnętrznego.
Czas narażenia:Określa, jak długo każdy wiersz pikseli jest aktywny, a tym samym ustala wysokość obszaru aktywnego dla danego czasu linii i czasu opóźnienia.
Opóźnienie linii:Tyle dodatkowego opóźnienia dodaje tryb sterowania roletą. Tryb sterowania roletą umożliwia dodanie opóźnienia.w wielokrotnościach całkowitych czasu liniiNa przykład, jeśli czas linii dla kamery wynosi 10 mikrosekund, dodatkowe opóźnienie na linię wynosi 1, 2,…można dodać do 8928, co oznacza liczbę wielokrotności 10 mikrosekund.
Ważna jest również wysokość obszaru zainteresowania (ROI), ponieważ określa ona liczbę linii, które obszar aktywny musi przesunąć w dół, zanim zostanie zresetowany.
Tryby synchronizacji sterowania roletą rolowaną
Tryb sterowania roletą rolowaną ma dwa tryby działania, w zależności od tego, która zmienna jest ważniejsza do kontrolowania.
In Tryb opóźnienia czasowego liniiMożesz ustawić czas opóźnienia zgodnie z powyższymi specyfikacjami. Oprogramowanie może następnie wskazać, dla określonego czasu ekspozycji, jaka będzie wysokość szczeliny – wysokość aktywnych pikseli w migawce toczącej się.
In Aktywny piksel / wysokość szczelinyW trybie tym możesz ustawić liczbę rzędów czujnika, które mają być aktywne podczas przesuwania migawki. Wybrany czas ekspozycji zostanie następnie wykorzystany do obliczenia wymaganego opóźnienia czasowego linii, aby automatycznie uzyskać tę wysokość szczeliny.
Konfigurowanie trybu sterowania roletą w oprogramowaniu
Sterowanie trybem operacyjnym (statusem)
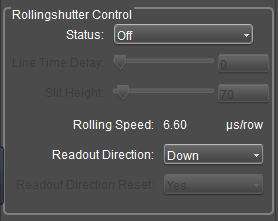
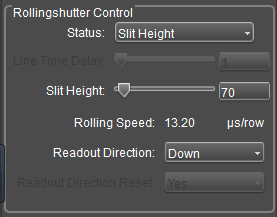
Rysunek 3: Przykładowy interfejs do sterowania trybem sterowania roletami w oprogramowaniu Tucsen Mosaic. Wszystkie opcje dostępne poprzez Micro-Manager i SDK.
Dostępne są trzy statusy (tryby działania):Off, Opóźnienie linii, Wysokość szczeliny.
• Po ustawieniu naWyłączony, czujnik zachowuje się normalnie, bez żadnego dodatkowego opóźnienia.
• Po ustawieniu naOpóźnienie liniiW tym trybie można określić opóźnienie czasowe linii w jednostkach czasu linii, jak wyjaśniono powyżej.
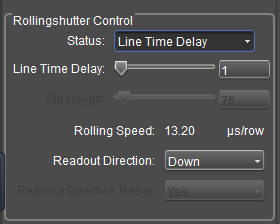
Rysunek 4: Opcje oprogramowania opóźnienia czasowego linii. PrzykładInterfejs oprogramowania Tucsen Mosaic. Wszystkie opcje dostępne za pośrednictwem Micro-Manager i SDK.
Liczba cykli czasu linii, które można dodać do konfigurowalnego opóźnienia, różni się w zależności od kamery. Nowy czas linii kamery po dodaniu opóźnienia wynosi zatem:
Czas odstępu między wierszami = czas między wierszami(transduktor)+(Czas trwania linii(transduktor)× Opóźnienie czasowe linii)
Wartość parametruPrędkość toczeniajest równyCzas interwału linii.
Całkowity czas odczytu obrazu wynosi zatem:
Rgłowapoza czasem(obraz)= Czas interwału linii×Nwydziwianie.
Nwydziwianieto całkowita liczba rzędów pikseli obrazu w obszarze zainteresowania. Liczba klatek na sekundę podczas obrazowania w tym trybie zależy od liczby linii do obrazowania i czasu cyklu linii:
Szybkość klatek = 1/(Czas odczytu(obraz)+ Czas ekspozycji)
•Gdy ustawione naWysokość szczeliny mode, możesz ustawićrozmiar skanowanego obszaru aktywnego, podany przez tLiczba wierszy pikseli pomiędzy sygnałem „resetu” i sygnałem „odczytu”.Zakres wysokości szczeliny wynosi od 1 do 2048 pikseli. Aby przeliczyć tę wartość na rozmiar fizyczny, należy pomnożyć tę wartość przez rozmiar piksela z karty specyfikacji aparatu.
Rysunek 5: Opcje sterowania trybem wysokości szczeliny. PrzykładInterfejs oprogramowania Tucsen Mosaic. Wszystkie opcje dostępne za pośrednictwem Micro-Manager i SDK.
Oprogramowanie automatycznie obliczy wymagane opóźnienie czasowe linii i odstęp czasowy między liniami. Wzór jest następujący:
Opóźnienie czasowe linii = czas ekspozycji(Kwestia)/ Wysokość szczeliny(Kwestia)
W trybie High Speed (tryb wzmocnienia kamery) zakres wysokości szczeliny można ustawić tylko na liczbę parzystą, ponieważ w tym trybie linie są odczytywane po dwa. Parametry w trybie High Speed oblicza się w następujący sposób.
Opóźnienie czasowe linii = czas ekspozycji(Kwestia)/ ½Wysokość szczeliny(Kwestia)
Wysokość szczeliny = (Czas narażenia(Kwestia)÷ Opóźnienie czasowe linii)×2
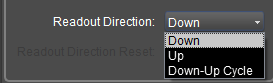
Sterowanie kierunkiem skanowania
Istnieją trzy możliwości kierunku rolety:
Dwłasny:Kierunek skanowania w dół jest domyślnym kierunkiem skanowania dla kamer sCMOS. Migawka typu rolling shutter rozpoczyna się od pierwszego rzędu u góry matrycy i skanuje w dół do ostatniego rzędu u dołu. Każda kolejna akwizycja klatek rozpoczyna się od pierwszego rzędu u góry.
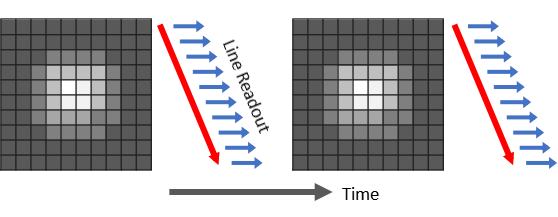
Rysunek 6: Schemat trybu skanowania w dół
Up:W trybie skanowania w górę migawka rozpoczyna się od dolnego rzędu i skanuje w górę do górnego rzędu pierwszego rzędu. Każda kolejna akwizycja klatek rozpoczyna się od dolnego rzędu. Chociaż kolejność przechwytywania danych w kamerze jest teraz odwrócona, obraz wynikowy dostarczany do oprogramowania nadal będzie odzwierciedlał pierwotną orientację, tj. obraz nie będzie odwrócony w pionie względem trybu skanowania w dół.
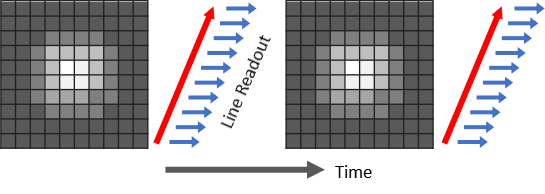
Rysunek 7: Schemat trybu skanowania w górę
Cykl w dół-w górę:Podczas naprzemiennego skanowania w górę i w dół, migawka rozpoczyna skanowanie od pierwszego rzędu u góry i przechodzi w dół do ostatniego rzędu u dołu. W kolejnej klatce migawka rozpoczyna skanowanie od dolnego rzędu i przechodzi w górę do górnego rzędu itd. Orientacja obrazu uzyskanego w tym trybie jest taka sama, jak w przypadku skanowania w dół.

Rysunek 8: Schemat trybu skanowania cyklu w dół i w górę
• Reawątpliwy kierunek resetowania
Funkcja ta jest dostępna wyłącznie w trybie cyklu Down-Up.
Domyślnym ustawieniem tego parametru jest „Tak”, co zapewnia, że pierwsza klatka każdej nowej sekwencji akwizycji rozpocznie się od najwyższego wiersza i będzie skanowana w dół.
Gdy ten parametr jest ustawiony na „Nie”, pierwsza klatka każdej nowej akwizycji rozpocznie się w pozycji ostatniej klatki w poprzedniej sekwencji. Jeśli ostatnia klatka kończy się w dolnym rzędzie, pierwsza klatka kolejnych akwizycji rozpocznie się w dolnym rzędzie i będzie rozprzestrzeniać się w górę.











